can_driver_node2.h File Reference
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Functions | |
| int | CAN_init (uint16_t mode) |
| uint8_t | CAN_loopback (uint8_t data) |
| void | CAN_transfer (uint8_t data) |
| void | CAN_receive (int8_t *receive_array) |
Function Documentation
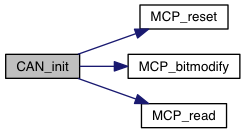
◆ CAN_init()
| int CAN_init | ( | uint16_t | mode | ) |
Here is the call graph for this function:
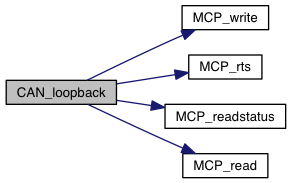
◆ CAN_loopback()
| uint8_t CAN_loopback | ( | uint8_t | data | ) |
SET ARBRITARY VALUES FOR ID AND DATA LENGTH
< Load data into TX0 buffer
WAIT FOR RX BUFFER 0 INTERUPT
SET ARBRITARY VALUES FOR ID AND DATA LENGTH
< Load data into TX0 buffer
WAIT FOR RX BUFFER 0 INTERUPT
Here is the call graph for this function:
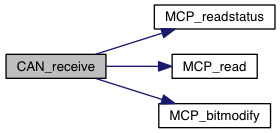
◆ CAN_receive()
| void CAN_receive | ( | int8_t * | receive_array | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

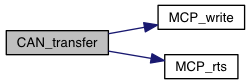
◆ CAN_transfer()
| void CAN_transfer | ( | uint8_t | data | ) |
Send message on can bus.
- Parameters
-
data Data to send on bus
Here is the call graph for this function:
Here is the caller graph for this function:

