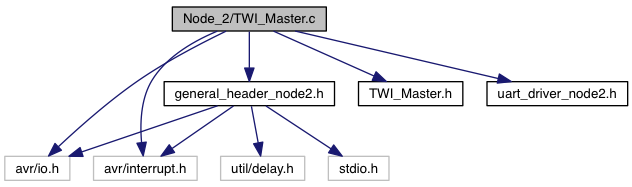
#include <avr/io.h>#include <avr/interrupt.h>#include "TWI_Master.h"#include "general_header_node2.h"#include "uart_driver_node2.h"
Include dependency graph for TWI_Master.c:
Functions | |
| void | TWI_Master_Initialise (void) |
| unsigned char | TWI_Transceiver_Busy (void) |
| unsigned char | TWI_Get_State_Info (void) |
| void | TWI_Start_Transceiver_With_Data (unsigned char *msg, unsigned char msgSize) |
| void | TWI_Start_Transceiver (void) |
| unsigned char | TWI_Get_Data_From_Transceiver (unsigned char *msg, unsigned char msgSize) |
| ISR (TWI_vect) | |
Variables | |
| union TWI_statusReg | TWI_statusReg = {0} |
Function Documentation
◆ ISR()
| ISR | ( | TWI_vect | ) |
◆ TWI_Get_Data_From_Transceiver()
| unsigned char TWI_Get_Data_From_Transceiver | ( | unsigned char * | msg, |
| unsigned char | msgSize | ||
| ) |
Here is the call graph for this function:

◆ TWI_Get_State_Info()
| unsigned char TWI_Get_State_Info | ( | void | ) |
Here is the call graph for this function:

◆ TWI_Master_Initialise()
| void TWI_Master_Initialise | ( | void | ) |
Here is the caller graph for this function:

◆ TWI_Start_Transceiver()
| void TWI_Start_Transceiver | ( | void | ) |
Here is the call graph for this function:

◆ TWI_Start_Transceiver_With_Data()
| void TWI_Start_Transceiver_With_Data | ( | unsigned char * | msg, |
| unsigned char | msgSize | ||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

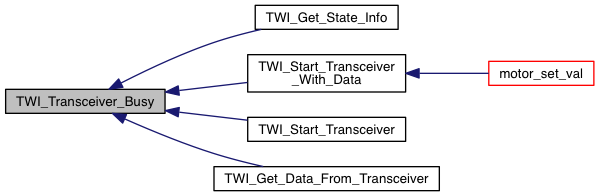
◆ TWI_Transceiver_Busy()
| unsigned char TWI_Transceiver_Busy | ( | void | ) |
Here is the caller graph for this function:
Variable Documentation
◆ TWI_statusReg
| union TWI_statusReg TWI_statusReg = {0} |
